More about Mobile Robot
The engineering curriculum offered at Pemberton Township Highschool included an informal conceptual to prototype design process as their junior course.
Students in this class would have had some supervision in the conceptual design process.
Conceptual Design Presentation
As part of taking this course, students completed a conceptual design presentation.
Passing the conceptual design review provided funding for the project.
While we had guarenteed placement in the course, it sometimes took students multiple design reviews before getting to work with actual parts.
See how I did
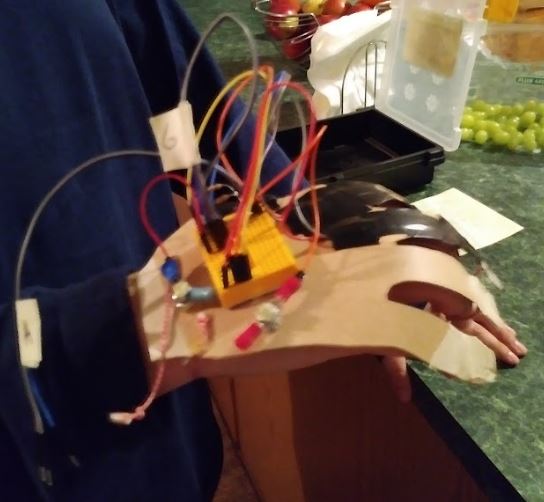
First Prototype Controller
Fashioned out of cardboard, this tracing of a hand served as the testing ground for the flex sensors.
The Arduino collected initial data that was crucial to building the delivered prototype.
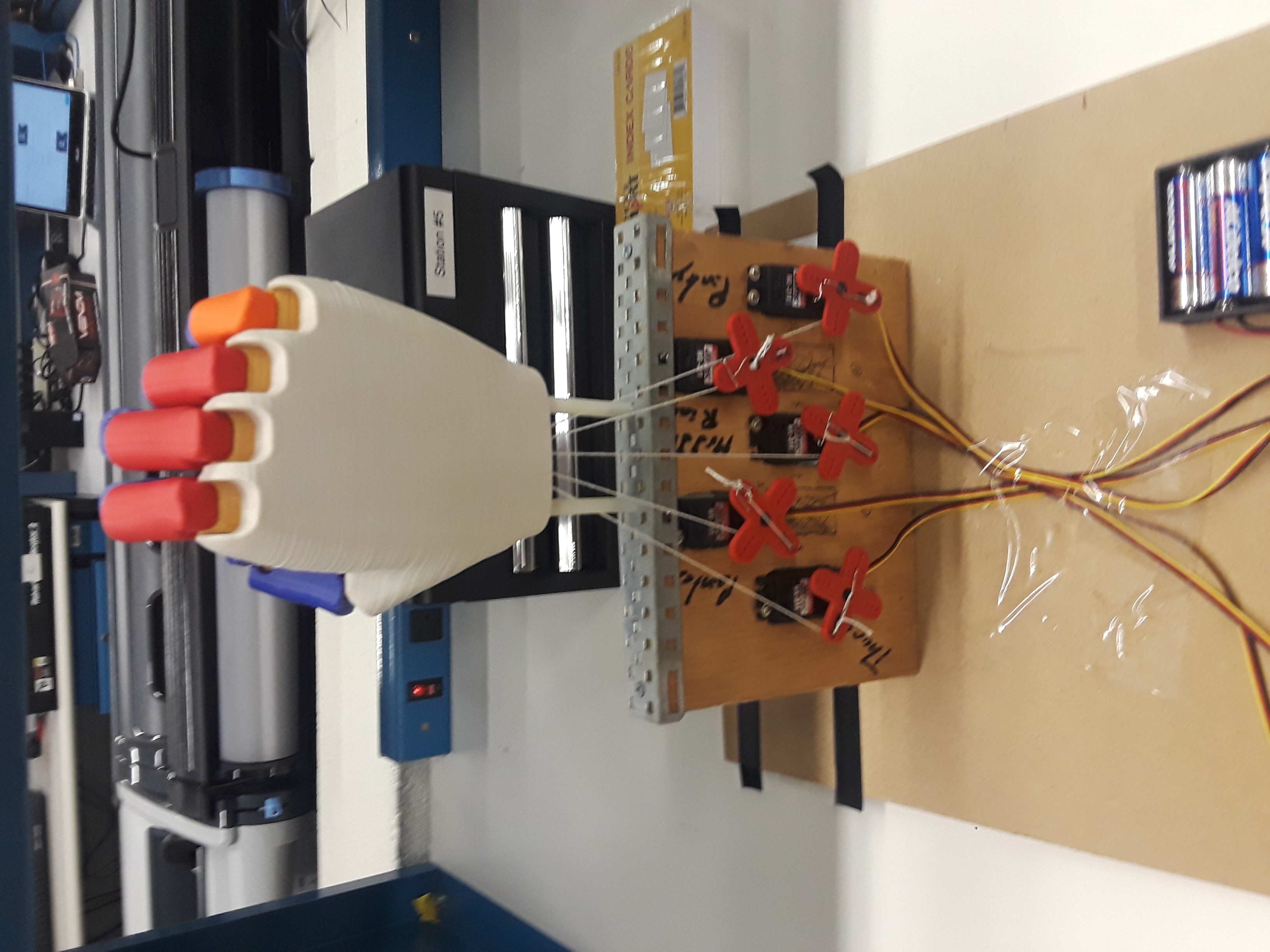
Hand Testing Stand
This stand was designed to mount the 3D printed hand.
Servos were attached to strings that were fed into the hand and attached inside to the fingers.
3D printed using a Makerbot printer in the Makerbot slicer.
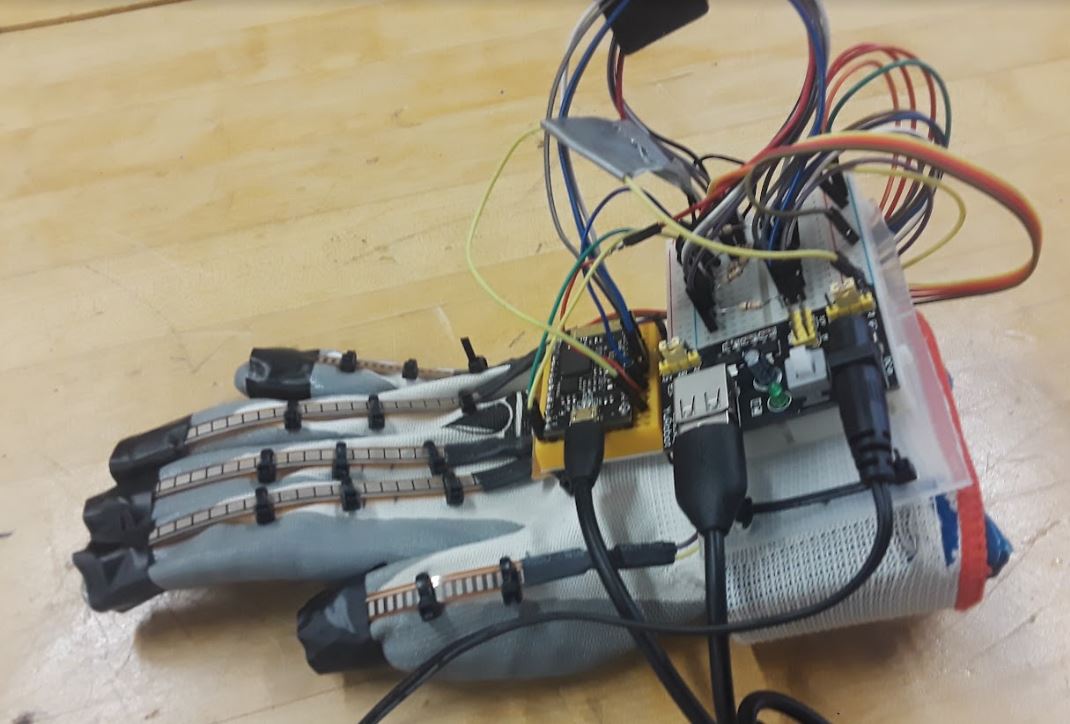
Delivered Glove Controller
This is the glove that was delivered during the prototype design review
The user would wear the glove and by moving their fingers, control the 3D printed hand.
In addition, a wifi enabled module could be attached to enable wifi connectivity via REST API.